SolarWaves digitaler Zwilling
… oder „Warum ist das mit der Modellentwicklung für die Reichweiten Vorhersage nicht so ganz einfach?“
„Das mit einem Solarboot ist doch ganz einfach: Wenn die Sonne scheint, fährt es.“
Richtig.
„Das mit einem Solarboot ist doch ganz einfach: Wenn die Sonne scheint, fährt es, wenn nicht, dann bekommt es die Energie aus der Batterie.“
Grundsätzlich auch richtig. Zumindest solange noch Energie in der Batterie ist. Und jetzt fügen wir noch einige weitere Anforderungen hinzu:
- Ich will an einem bestimmten Tag von A nach B fahren.
- Ich möchte so schnell wie möglich in B ankommen (zum Beispiel bei einem Solarboot Rennen).
- Ich möchte, dass der Ladestand der Batterie bei Ankunft in B auf einem bestimmten Level ist.
Und dann kommen wir schon zu all den Dingen, die wir dafür berücksichtigen müssen – erstmal die bekannten Größen:
- Ich habe eine bestimmte Anzahl Solarpaneele dabei, die eine bekannte Peak-Leistung liefern.
- Ich habe eine Batterie an Bord, die mir eine bestimmte Menge Energie speichern kann.
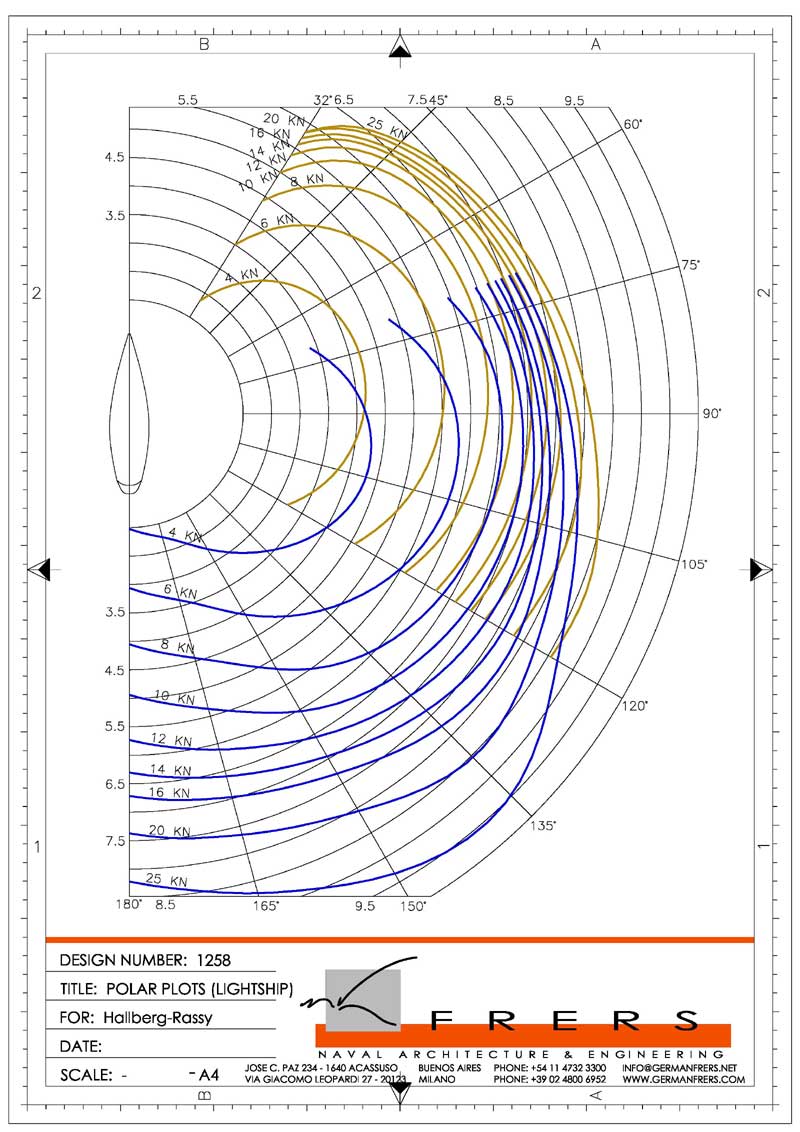
Die nächste Frage, die ich dann zu beantworten habe, ist, wie viel Sonnenertrag ich zu einem gegebenen Zeitpunkt haben werde. Das ist verständlich. So wie ein Segler auf die Windvorhersage schaut, sieht ein Solarskipper auf die Bewölkungsvorhersage. Aber das ist bei weitem nicht alles. Denn es gibt einen ganz großen Unterschied, den sogenannten internen Status – nämlich die Batterie. Ein Segelboot segelt bei einer gegebenen Windstärke aus einer bestimmten Richtung und mit den dafür geeigneten Segeln exakt mit einer bestimmten Geschwindigkeit. Dafür gibt jeder Hersteller von Segelbooten ein sogenanntes Geschwindigkeits- oder Polardiagramm an, das die Luvgeschwindigkeit in Abhängigkeit vom Kurs zum Wind bestimmt. Wikipedia erläutert dies hier. Wer noch mehr dazu wissen möchte: Das Prinzip des Polardiagramms wird in diesem Blogbeitrag (Englisch oder Französisch) auf der Webseite von „lagoon-inside.com“ hervorragend erläutert. Hier noch ein konkretes Beispiel wie ein Yachthersteller sein Polardiagramm angibt: das Diagramm der Hallbergy-Rassy 310 zeigt die mögliche Geschwindigkeit bei verschiedener Besegelung zum jeweiligen Kurs:
{kind=link}
Für ein Segelboot, das ohne Motor unterwegs ist, heißt das, dass man sehr genau vorhersagen kann, wann ein Segelboot an Punkt B ankommt, das ist nämlich nur abhängig vom Segelkurs den man in Abhängigkeit vom Wind, also Windrichtung und Windstärke, einschlagen kann. Bei einem solarbetriebenen Elektroboot, also einem Boot mit Elektromotor, dessen Batterien durch die Sonneneinstrahlung gespeist werden, ist es wesentlich komplizierter. Es ist im Verhältnis so viel komplizierter wie das berühmte Dreikörperproblem in der Physik im Vergleich zum analytisch lösbaren Zweikörperproblem. Das Dreikörperproblem kann nur numerisch, also iterativ, gelöst werden.
Welche Fragen sind zu beantworten?
- Wie ist der Sonnenertrag an einem bestimmten Tag an einem bestimmten Ort? Dafür gibt es Bewölkungsvorhersagen, z.B. von meteoblue, die mehr oder weniger zuverlässig sind. Denn wenn es Bewölkung gibt, ist die Wettersituation meist instabil.
- Wie ist der Ladestand der Batterie an Punkt A und wie soll er sein wenn wir bei Punkt B ankommen. Dazwischen darf er nicht unter einen bestimmten Schwellwert sinken. Das wird monitort und die Information ist immer verfügbar.
- Wie viel Energie verbrauche ich pro gefahrene Seemeile, bei einer bestimmten Geschwindigkeit? Das ist für die SolarWave bekannt, das könnte man in einem entsprechenden Polardiagramm aufzeigen.
Dann gibt es weitere Faktoren, einen sogenannten externen Status, der kritisch ist, aber schwerer zu bekommen und vor allem wesentlich komplizierter in ein Modell zu integrieren:
- Wie ist der Wind – Stärke und Richtung? zu welchem Zeitpunkt? Die SolarWave als großer Katamaran fährt bei stärkerem Wind von hinten bis zu 2 Knoten schneller. Entsprechend langsamer bei Wind gegenan.
- Gibt es eine Strömung? In manchen Bereichen der ionischen Inseln gibt es Strömungen bis zu 2 Knoten, in Ausnahmefällen auch mal mehr.
- Wie wird die Welle? Windwelle und Dünungswelle können ganz unterschiedlich sein. Von Wellen von vorne wird die SolarWave stark ausgebremst. Dünungswellen von hinten können sie bis zu 2 Knoten beschleunigen.
Zur Annäherung an ein Modell zur Reichweitenvorhersage werden wir numerisch – iterativ vorgehen und die Möglichkeiten von AI/Machine Learning nutzen. In den letzten Jahren wurden an Bord der SolarWave Millionen von Datenpunkten gesammelt, die sukzessive in das Modell fließen können. Wir werden mit einem sehr einfachen Modell starten, Dieses Modell werden wir als digitalen Zwilling bei der nächsten Saison mitlaufen lassen. Dabei können wir sehr schön sehen, was der digitale Zwilling errechnet und was in der Realität passiert. Mit den dokumentieren Abweichungen werden wir in die Lage versetzt die nächsten Iterationen zu entwickeln.
Und wer mehr zu digitalen Zwillingen und ihrer Bedeutung im maritimen Umfeld nachlesen möchte, kann sich bei DNV.GL dazu informieren . In ihrem technologischen Ausblick 2030 greifen sie das Thema auf – hier gehts zur Webseite.
