Meet and Code 2019: Gewinne das virtuelle Solarboot-Rennen durch Programmierung eines Artificial Intelligence Skippers!
Die Solarboot-Projekte beteiligen sich an der Europäischen Initiative „Meet and Code 2019“.
Erreichen möchten wir eine Gruppe von Jugendlichen und jungen Erwachsenen, die durch den Einsatz von selbst entwickelter Software die ideale Lösung für ein komplexes Problem finden werden: die Aufgabe besteht darin, ein simuliertes Solarboot-Rennen um Korfu zu gewinnen.
Die Veranstaltung wird 2 Tage dauern.
Die Teilnehmerinnen konfigurieren ihr eigenes virtuelles Solarboot und programmieren ihren eigenen virtuellen Solarboot-Skipper. Durch ein geschicktes Energiemanagement soll das Boot optimal gefahren werden. Das Ziel ist, Korfu zu umrunden und als erster zum Ziel in der Hauptstadt Kerkyra zu kommen! Gewinnen wird der beste Algorithmus!
Das Setup ist eine komplexe Simulation, die eine Vielzahl von Besonderheiten des Reviers und des Solarboot-Fahrens umsetzt.
Der Event findet mit mehreren Gruppen parallel statt, die jeweils als Team ein Solarboot konfigurieren und die Steuerung für die Teilnahme am Rennen programmieren.
Im ersten Schritt wird von jedem Team das eigene Solarboot konfiguriert. Mit einem vorgegebenen virtuellen Budget können die verschiedenen Komponenten im Rahmen der technischen und finanziellen Möglichkeiten konfiguriert werden:
- Schiff
- Das Schiff kann aus verschiedenen Materialien gebaut und dadurch unterschiedlich schwer gestaltet werden.
- Die Größe des Schiffes ist ebenfalls wählbar – natürlich haben besonderer Leichtbau und extra Größe ihren Preis.
- Solargenerator
- Beim Solargenerator werden die Anzahl, die Ausrichtung und die Qualität der Solar-Zellen festgelegt.
- Die meisten Solarzellen kommen auf das Dach, damit sie Sonnenstrahlung von allen Richtungen aufnehmen können.
- Lohnt es sich, Solarzellen auch an den Seiten anzubringen?
- Batterie
- Welche Kapazität soll die Batterie haben?
- Mehr Kapazität erhöht das Gewicht und kostet viel Geld!
- Lademöglichkeit
- Wenn der extra Landanschluss konfiguriert wird können nachts die Batterien bei Ladestationen in den Marinas nachgeladen werden.
- Allerdings ist es ärgerlich, dass diese oft weit von der kürzesten Ideal-Route weg sind und eine extra Strecke gefahren werden muss, um sie zu erreichen… Lohnt sich das?
- Antrieb
- Als Antrieb kommen Motoren zum Einsatz bei denen die maximale Leistung konfiguriert werden kann.
- Leistungsfähige Motoren ermöglichen eine schnellere Fahrt!
- Allerdings werden die Motoren auch größer, schwerer, teurer und erfordern eine höhere Belastbarkeit des Stromnetzes.
Im zweiten Schritt wird das Rennen geplant und eine Rennstrategie festgelegt. Dafür muss der virtuelle Skipper programmiert werden. Eigentlich ist die Aufgabe des Skippers ja ganz einfach: die Motoren müssen zu jeder Zeit mit den optimalen Drehzahlen betrieben werden, so dass bei der schnellst möglichen Ankunft im Ziel die effizienteste Fahrweise erreicht wurde und alle Systeme und die verfügbaren Ressourcen optimal genutzt wurden. Ja, genau, ganz einfach!
Zu Beginn des Renntages gibt es aktuelle Wetterinformationen, die jedes Team berücksichtigt, um den virtuellen Skipper zu konfigurieren.
- Wie viel Energie ist am Start in der Batterie?
- Wie groß ist der Solarertrag?
- Wie weit ist die Strecke?
Der virtuelle Skipper hat während der Fahrt alle Informationen des aktuellen Renntages in Echtzeit zur Verfügung:
- Wie schnell fährt mein Boot? Wo befindet es sich aktuell?
- Wie viel Energie verbrauchen die Motoren?
- Wie viel Energie liefern die Solargeneratoren?
- Wie ist der Ladezustand der Batterien?
- Wie lang ist die verbleibende Tagesstrecke?
- Welchen Einfluss haben aktuell Wind, Welle, Strömung?
- Welche Wetterentwicklung ist vorhergesagt?
Nun muss er „nur noch die Motordrehzahl immer richtig“ einstellen – den Kurs steuert der Autopilot von einem Wegpunkt zum nächsten, das geht ganz automatisch. Das Einstellen der richtigen Motordrehzahl wird programmiert – denn während der Fahrt ist der Skipper autark!
Hier entscheidet sich, wer sein Boot optimal führt: wer optimal programmiert wird gewinnen!
Am Ende jeden Renntages entscheidet das Team, wie die Nacht verbracht wird:
- Ankern ermöglicht es, dicht an der optimalen Route zu bleiben
- Anlegen in der Marina ermöglicht das Aufladen der Batterien, so dass am Morgen mit vollen Batterien gestartet werden kann – wenn das Laden nur nicht so teuer wäre!
- Weiterfahren ist auch eine Option! Natürlich kann auch während der Nacht gefahren werden. Doch dann muss das Boot Platz bieten für mindestens zwei Personen, die sich abwechseln. Und die Batterie sollte auch nicht zu klein sein. Denn wenn gegen die Strömung gefahren werden muss… Natürlich muss auch die Batterie noch gut gefüllt sein, um weiterfahren zu können!
Die Runde um Korfu benötigt mehrere Tage – je nach Auslegung der Boote und Wetterbedingungen. Gewonnen hat der schnellste! Das virtuelle Budget wird dabei hoffentlich optimal eingesetzt.
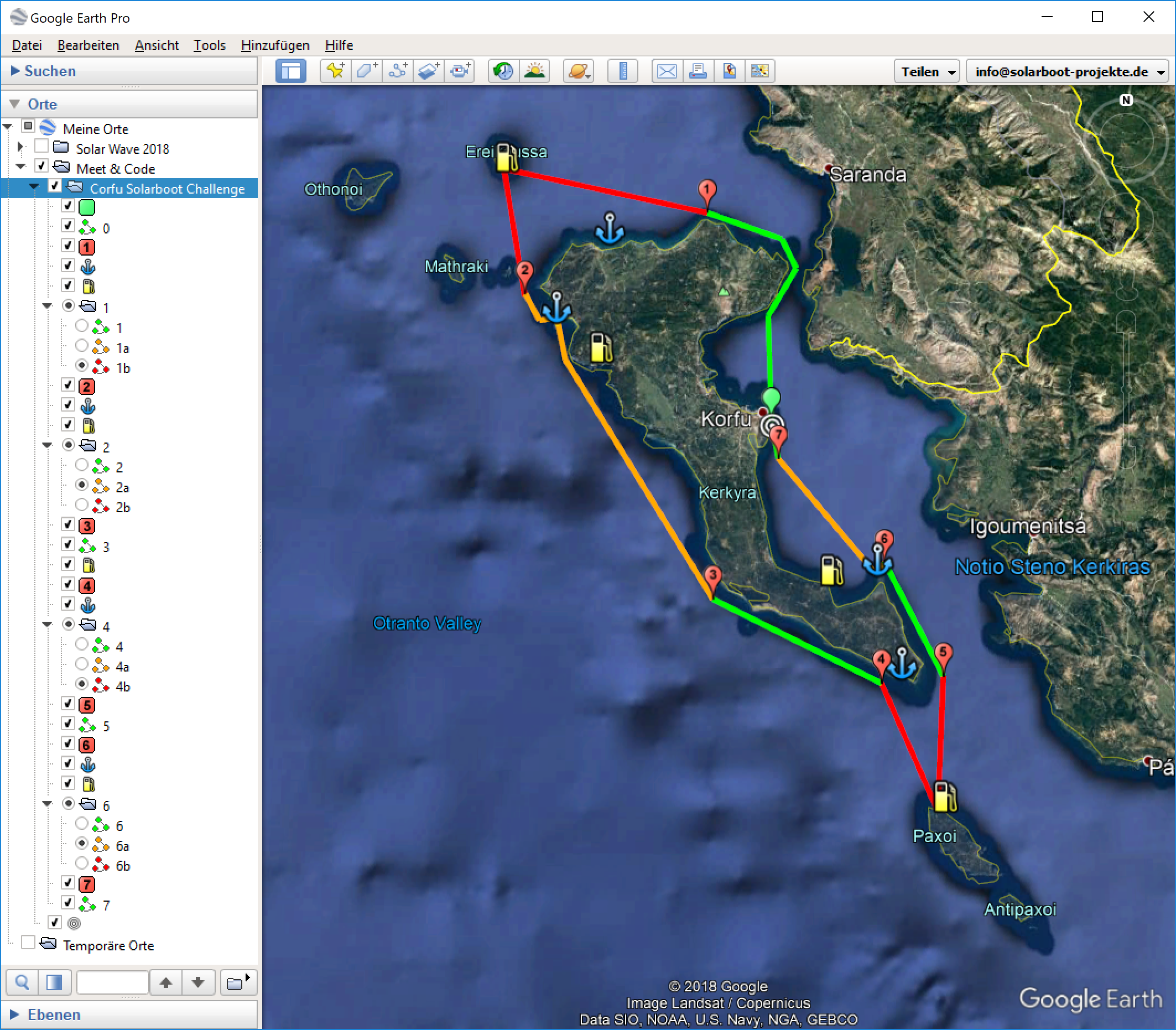
Vorgegeben ist die Karte mit Wegpunkten. Einige Wegpunkte müssen angefahren werden (Kontrollpunkte), andere ermöglichen es, zu Ankern (Ankerplätze) und in den Marinas können die Batterien nachgeladen werden (Ladestationen).
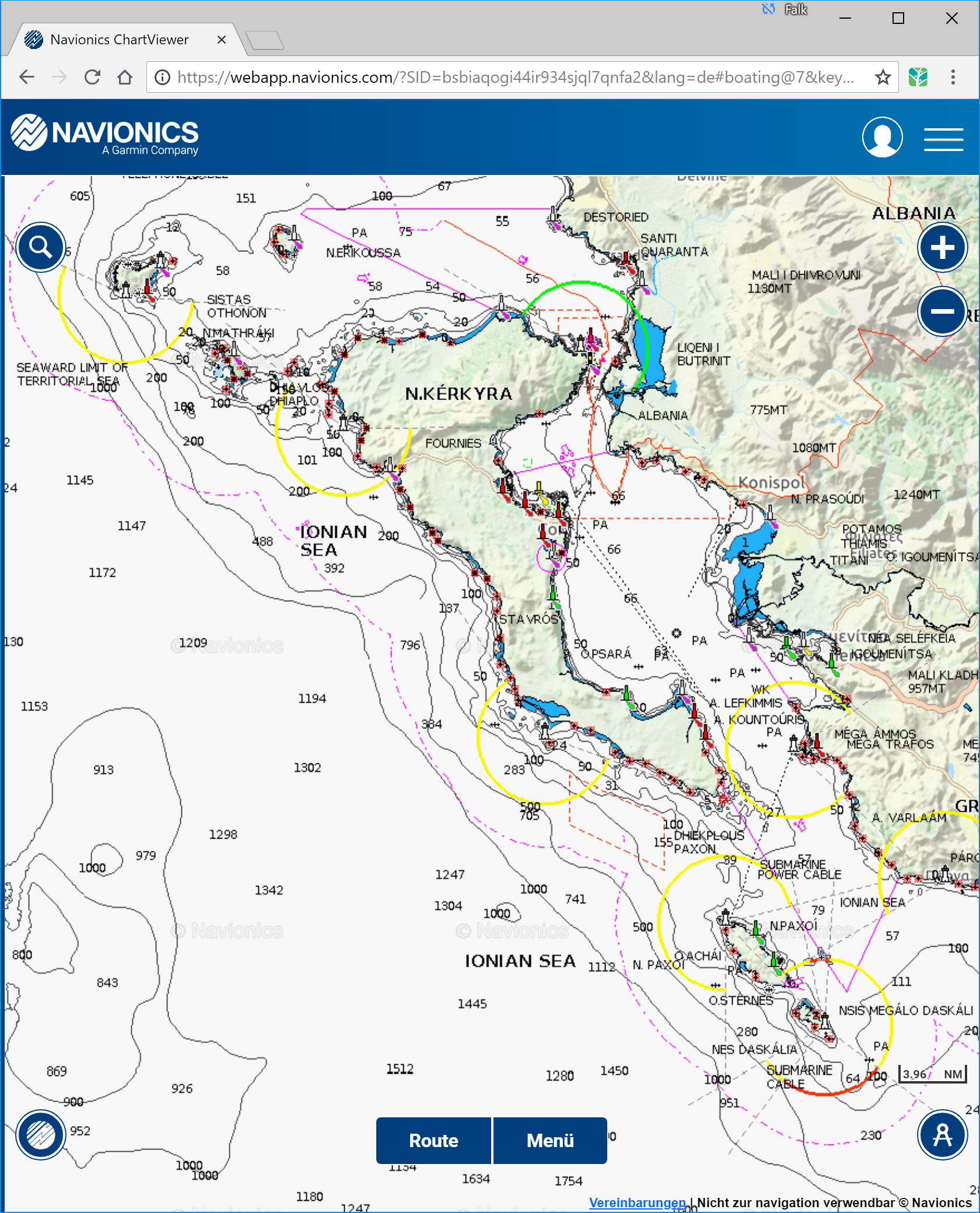
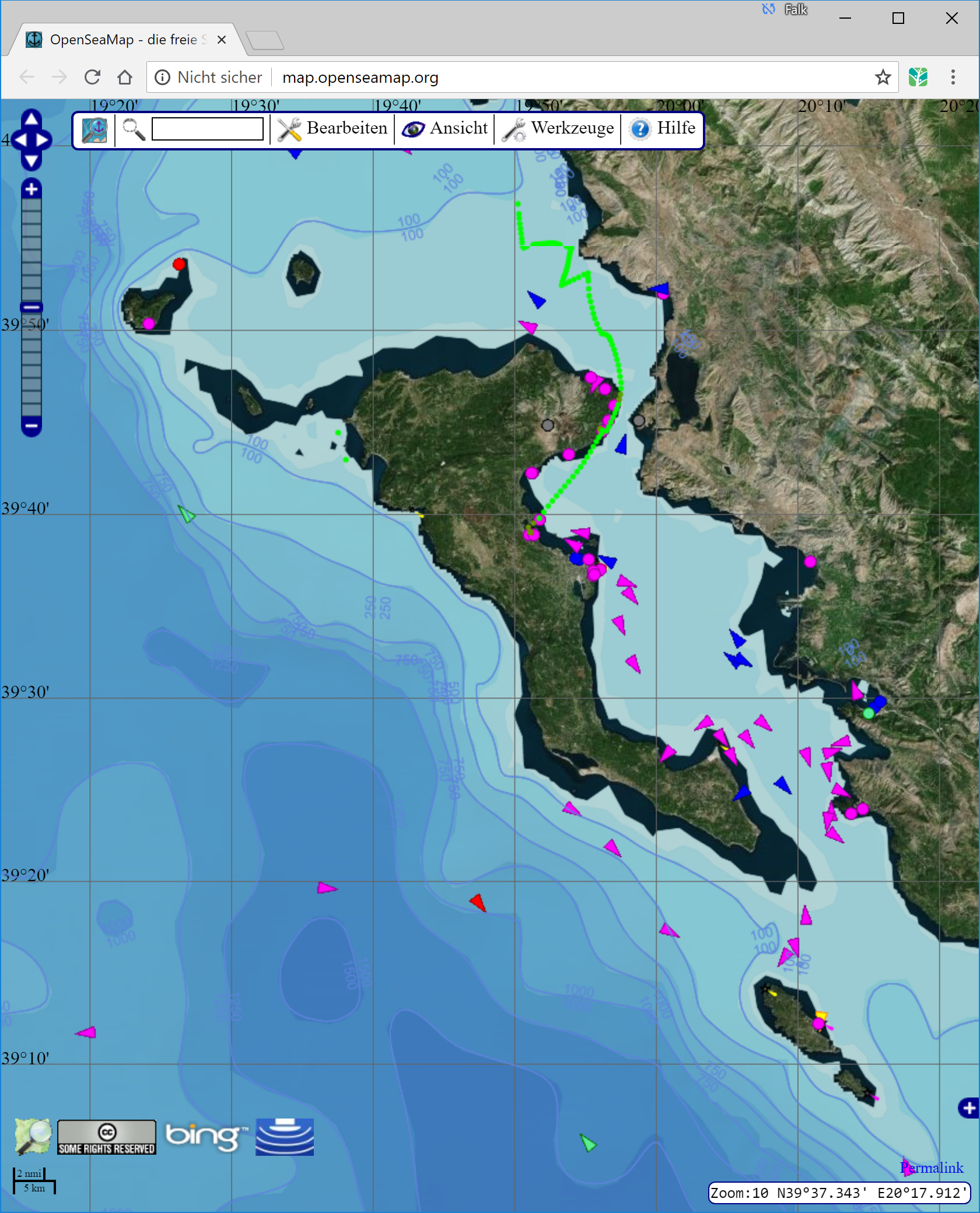
Verschiedene Darstellungen
Offene Fragen
- Welches Kartenformat soll verwendet werden?
- Google Earth
- Google Maps
- Navionics
- OpenSeaMap
- Soll es einen Echtzeitmodus geben?
- Fernsteuerung der Schiffe?
- Echtzeitinspektion (Debugging) des autonomen Skippers?
- Multi-Player?
- Sieht jedes Team dann nur die Daten des eigenen Schiffes?
- Welchen Preis erhält das Gewinner-Team?
- Eine Woche Forschungsaufenthalt auf der SolarWave in Griechenland?