Geo-Kodierung der Beobachtungen und Bilder
Eine Beobachtung ist charakterisiert durch:
- Beobachter
- Spezimen (beobachtetes Lebewesen: Tier, Pflanze, ….)
- Zeitpunkt
- Geo-Koordinaten
Es ist also nicht zwingend erforderlich, dass Bildaufnahmen für die Erfassung einer Beobachtung vorhanden sind. Es können auch Audio-Aufnahmen vorhanden sein oder gar keine Medien.
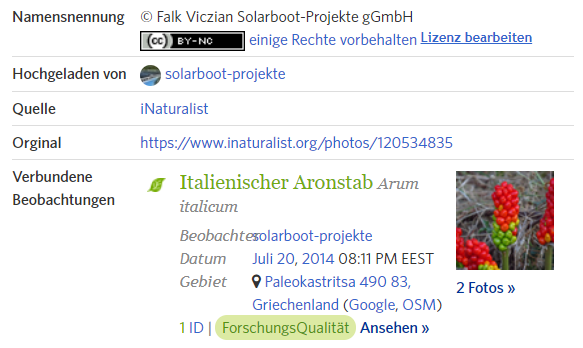
Für die Dokumentation und die Überprüfbarkeit der Informationen einer Beobachtung ist es jedoch zwingend eine Mediendatei (Bild- oder Audioaufnahme) erforderlich und deshalb ist die Verfügbarkeit einer Mediendatei ein Mindest-Kriterium für die Forschungsqualität einer Beobachtung.
Da für Beobachtungen mit Forschungsqualität Bilder erforderlich sind und die wichtigsten Metadaten einer Beobachtung als Metadaten von Bildern gespeichert werden können, ist es sinnvoll, Beobachtungen direkt ausgehend von den Bildern zu erfassen. iNaturalist.org liest folgende Informationen aus den Bild-Dateien aus, wenn sie vorhanden sind:
- Ersteller
- Spezies
- Aufnahmezeit
- GPS-Koordinaten
- Zusätzlich werden noch die weiteren EXIF-Daten zur Kamera geladen und gespeichert
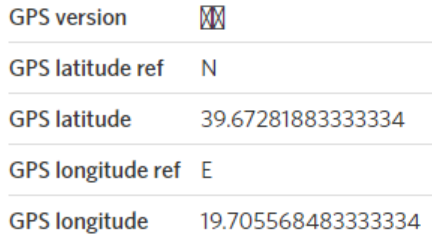
Für die Nutzung von Bildern als ergänzende Information zu Beobachtungen ist es sinnvoll, dass möglichst viele der Informationen aus den Metadaten der Bilder verwendet werden: Aufnahmezeit und Aufnahmeort lassen sich direkt verwenden.
Der Vorgang ist am einfachsten, wenn die Geo-Koordinaten direkt als EXIF-Daten in die Bilder integriert werden. Dies geschieht auf unterschiedliche Art je nachdem, welche Kamera verwendet wurde und ob die Kamera selber Geo-Koordinaten erfassen kann.
Kamera hat einen integrierten GPS-Empfänger
Dies ist der einfachste Fall. Praktisch jedes Smartphone hat heute einen GPS-Empfänger. Auch unsere Unterwasser-Kameras von Nikon sowie die Drohnen besitzen einen integrierten GPS-Empfänger. Was ist zu tun?
Es ist darauf zu achten, dass die GPS-Koordinaten auch tatsächlich erfasst werden – die GPS-Aufzeichnung ist nicht immer aktiviert – und es ist nicht immer möglich, GPS-Daten zu empfangen. Die GPS-Empfänger benötigen relativ viel Energie, den GPS-Empfänger auszuschalten verlängert also die Nutzungsdauer der Geräte. Bei Handys gibt es auch Datenschutzbedenken: nicht jeder möchte jederzeit seinen Standort preisgeben, wenn er Bilder teilt.
Smartphone
Smartphones sind sehr gut geeignet für die Küstendokumentation, da hier das Weitwinkel mit einer sehr großen Schärfe und einem hohen Detaillierungsgrad überzeugt. Im Einsatz hatten unsere Gäste seit 2014 Apple iPhones (5c, 5s, 6, 6 Plus, 6s, 8, SE, XR), Samsung (G920F, G950F, G965F, J530F), Sony (Z1, Z3),
In der Firma setzen wir Smartphones von Xiaomi ein: Mi A1 (ab 2018, 48 MP) und Redmi Note 8Pro (seit 2020, 64 MP). Die sehr hohe Auflösung ist sehr gut geeignet um bei sehr hellem Tageslicht brillante Küstenaufnahmen zu machen, die dann auch für die Geodäsie-Projekte eingesetzt werden können.
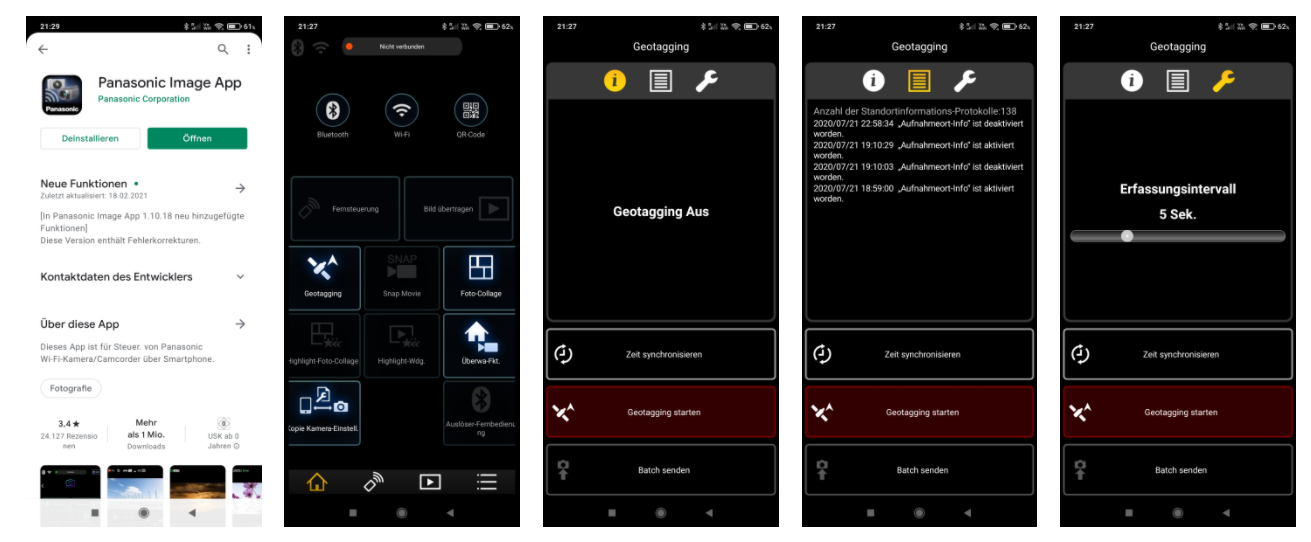
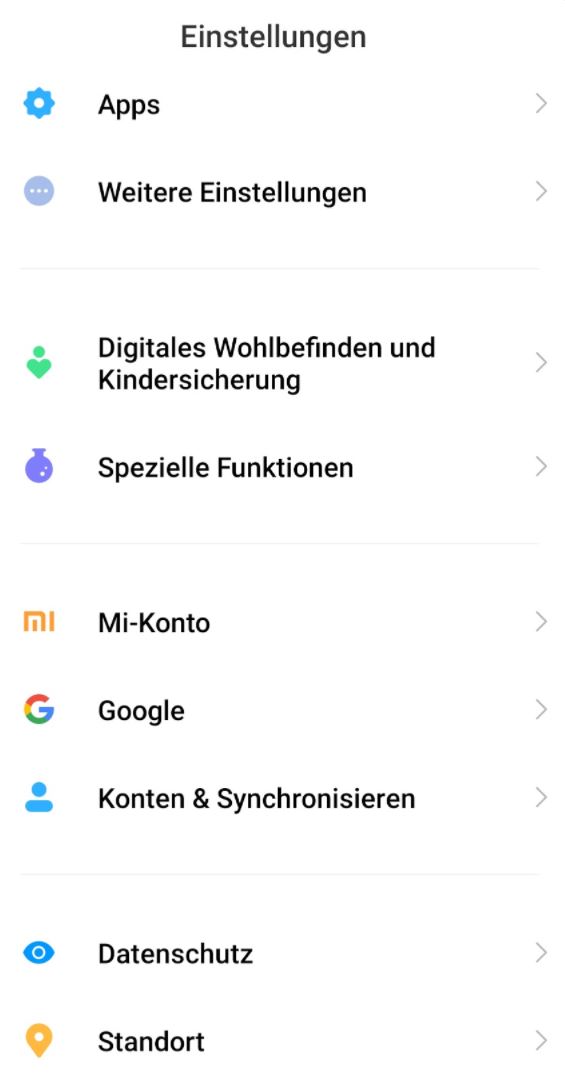
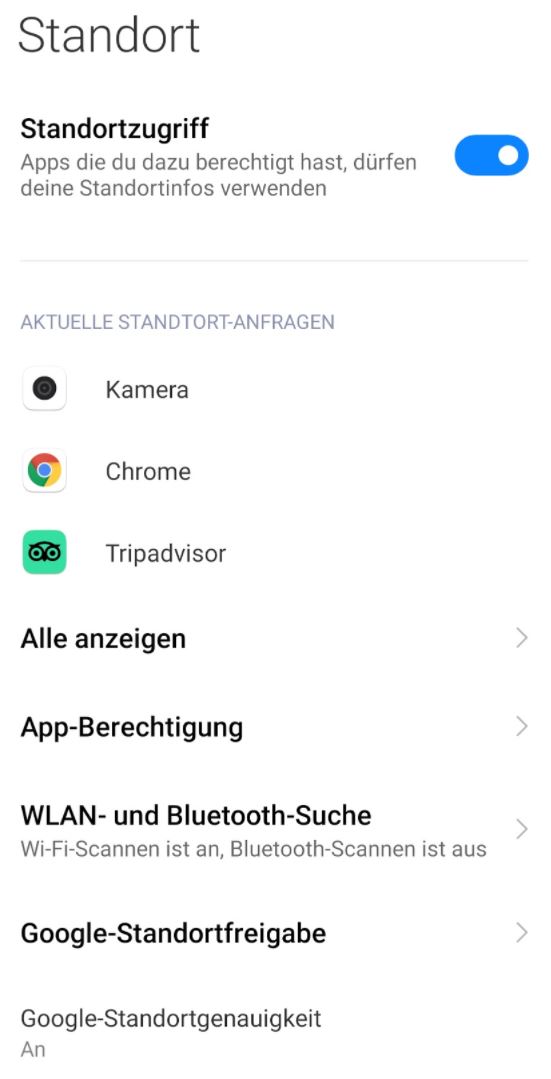
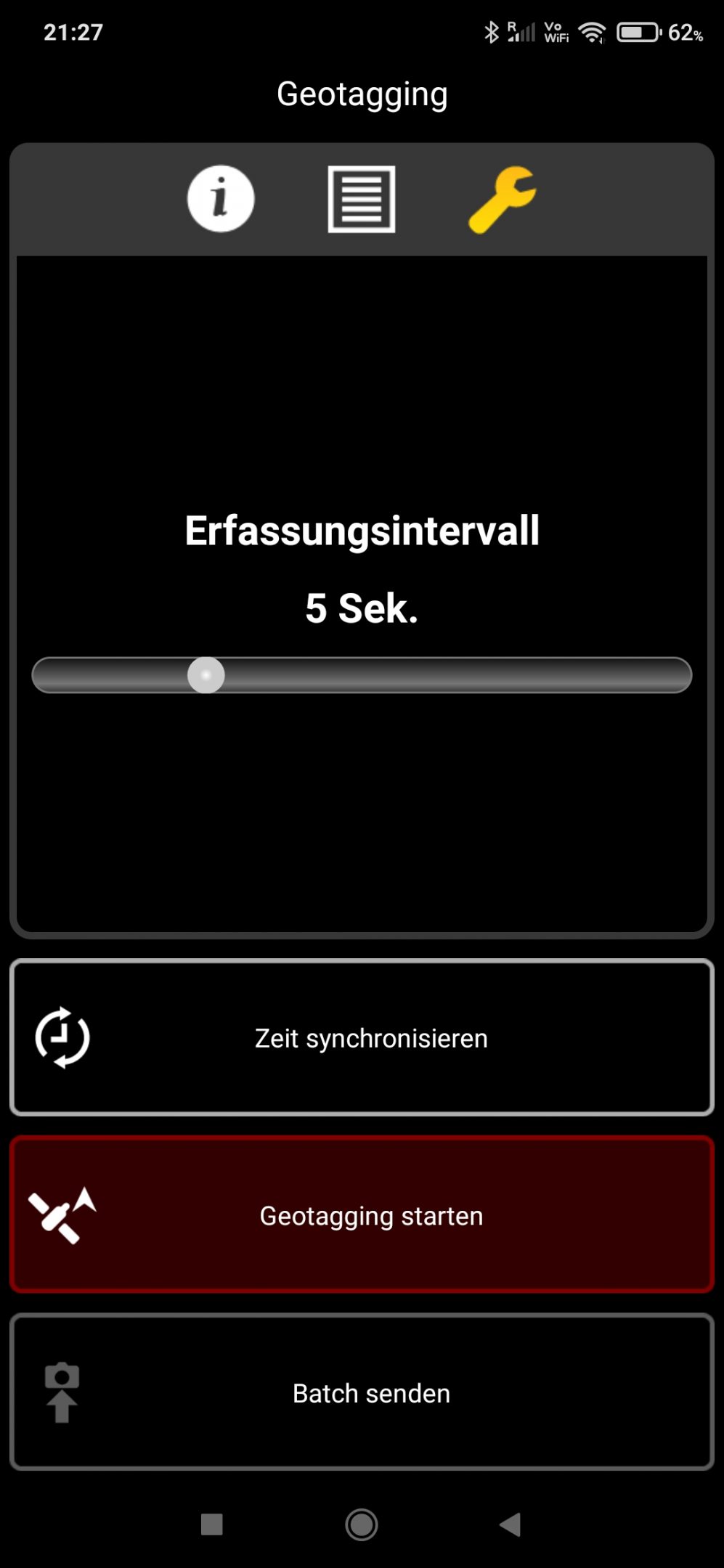
Die Standort-Erfassung muss eingeschaltet werden! Die folgenden Screenshots zeigen das Vorgehen bei den Xiaomi Redmi Note 8 Pro. Die Bedienung ist bei allen bekannten Modellen unkompliziert – wichtig ist nur, dass die Standortnutzung aktiviert wird und die GPS-Koordinaten in die EXIF-Metadaten der Bilder eingetragen werden.
In die EXIF-Metadaten von Filmen schreiben die Smartphones nichts hinein! Hier ist eine einfache Möglichkeit, vor und nach jedem Film jeweils eine Referenzaufnahmen zu machen – und diese haben dann auch die GPS-Koordinaten!
Unterwasser-Kamera Nikon AW-110, AW-130, AW-300
Wir haben 2014 zum ersten Mal eine Nikon AW 110 eines Gastes (Andreas B.) an Bord gehabt. Eine sehr einfach einsetzbare, robuste Unterwasser-Kamera mit guter Bildqualität (16 MP). Da wir ausschließlich Apnoe-Tauchen bis max. 10 m Tauchtiefe ist diese Kamera mit einer spezifizierten Tauchtiefe von 12 m dafür vollkommen ausreichend.
2015 haben wir für die Firma das Nachfolgemodell NIKON AW-130 gekauft mit einer etwas besseren Spezifikation. Die Kamera ist immer noch im Einsatz, obwohl sie zwischenzeitlich mehrere hundert Betriebsstunden im Wasser hatte.
2020 wurde die Nikon AW-130 durch eine Nikon AW-300 ergänzt. Die für uns wichtigste neue Fähigkeit dieses Modells ist die Möglichkeit, in 4K zu filmen. Dies verbessert einerseits unsere Filmmöglichkeiten. Wichtiger ist uns jedoch die Möglichkeit, nun Standbilder in 4K (3840 x 2160) statt in 2K (1920 x 1080) aus Filmen zu entnehmen. Diese Qualitätssteigerung ist enorm wichtig! Also 8 Megapixel statt 2 MP – der Unterschied ist deutlich sichtbar und hilft bei der Bestimmung der Arten.
Gerade unter Wasser als Apnoe-Taucher ist es schwierig, Einzelaufnahmen zu machen – sehr viel leichter ist es, die Kamera auf Film-Modus zu stellen und sich dann darauf zu konzentrieren, das Motiv nicht zu stören und gut aufzunehmen.
Positionsbestimmung unter Wasser
GPS funktioniert unter Wasser schon bei sehr geringen Eintauchtiefen von mehreren Zentimetern nicht, da die Satellitensignale vom Wasser sehr effektiv abgeschirmt werden. Die Nikon-Kameras haben die Möglichkeit, alle Bilder eines Tauchgangs mit den letzten, direkt vor dem Tauchgang aktualisierten GPS-Koordinaten zu kennzeichnen. Für Apnoe-Taucher eine ausreichende Möglichkeit, da wir bei einem Tauchgang nur weniger als 100 m unter Wasser zurück legen.
Wir arbeiten an verschiedenen Projekten für die passive und aktive Unterwasser-Ortung.
Zusätzlich zu den GPS-Koordinaten werden auch die Tauchtiefen aufgezeichnet – dies ist für die Beobachtungen (und eine automatisierte tiefenabhängige Farbkorrektur) sehr hilfreich. Die Habitate unterscheiden sich durchaus. Bei 1 m Wassertiefe sind die Bedingungen ganz anders als bei 3, 5 oder 10m.
Kamera mit korrespondierender App
Da der Betrieb eines GPS-Empfängers relativ viel Energie benötigt bauen immer noch viele Kamera-Hersteller keinen GPS-Empfänger ein. Die Kosten können nicht das Problem sein: die Chips kosten 1 bis 5 Euro – bei einer Kamera für mehrere hundert oder tausend Euro ist es eigentlich nicht nachvollziehbar, darauf zu verzichten.
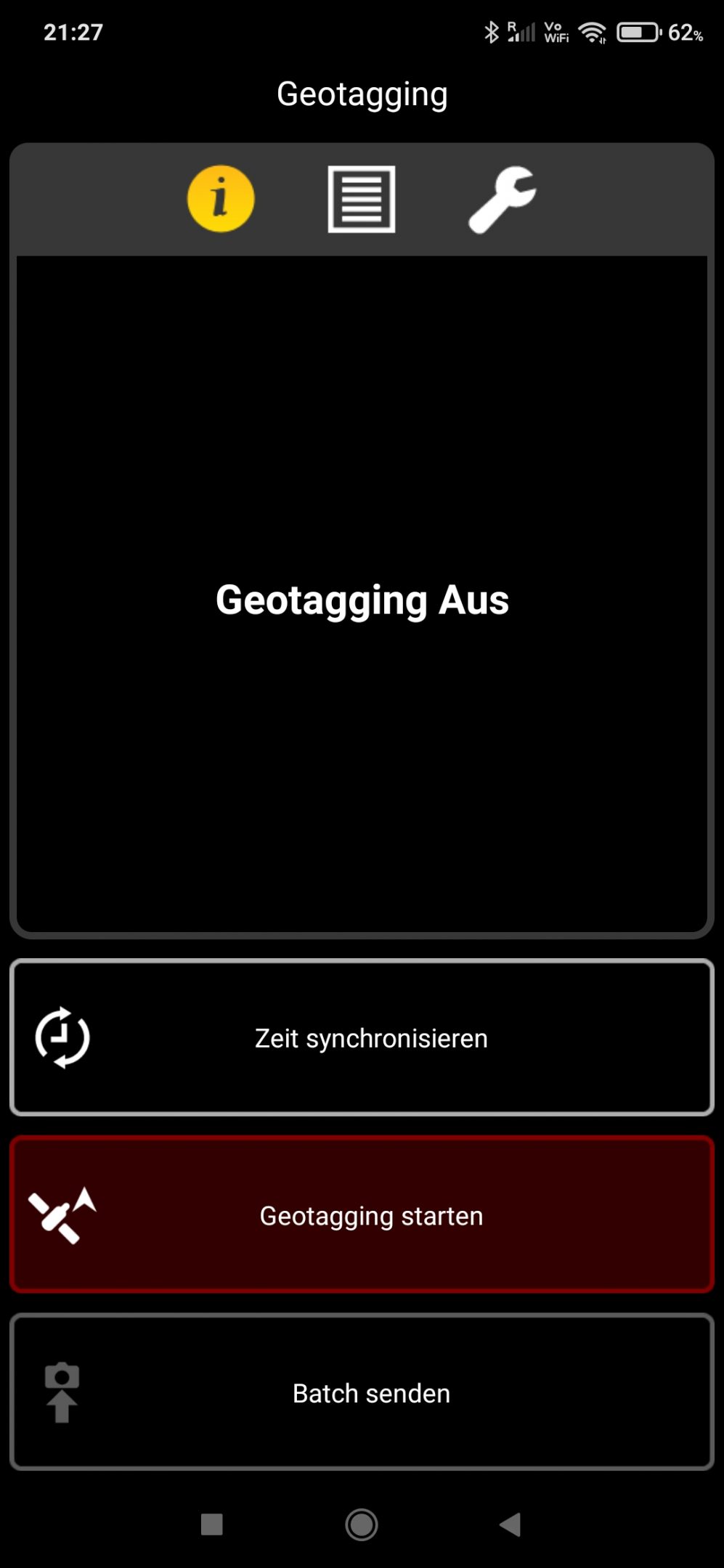
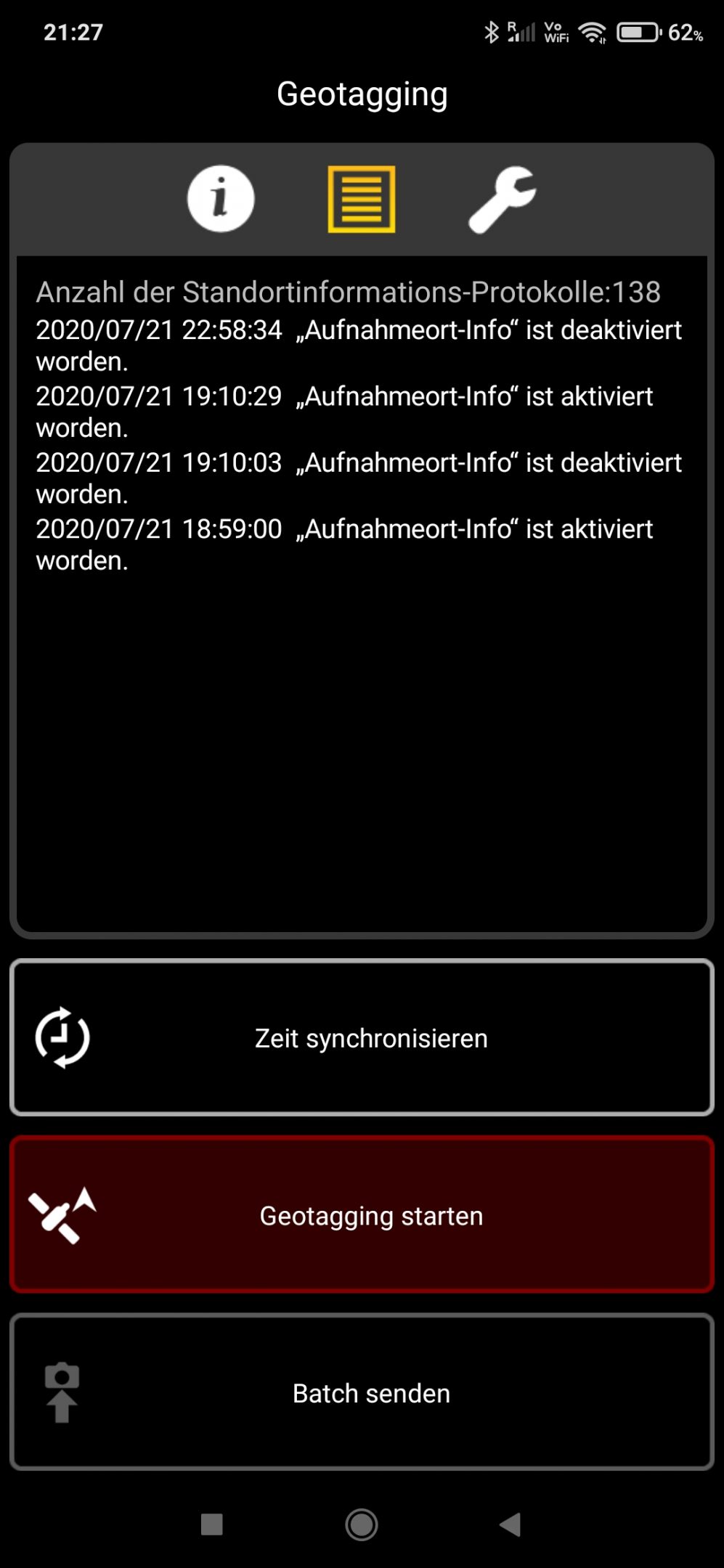
Panasonic Lumix FZ-2000 mit Panasonic App
Für die Panasonic nutzen wir die App wenn wir an Land unterwegs sind. Wenn wir jedoch auf dem Boot unterwegs sind und die Beobachtungen von Bord aus gemacht werden (Beobachtungen von Delphinen, Mönchsrobben, Meeresschildkröten) ist es einfacher, den GPS-Log des Bootes (SolarWave) als GPX-Datei mit einer definierten Auflösung von 1 min. zu transformieren und bereit zu stellen.

Nachträgliche Geo-Kodierung mit GPX-Log
Verschiedene Programme können Bilder und Videos nachträglich mit GPS-Koordinaten versehen. Wir setzen Adobe Lightroom Classic ein und dieses Profi-Programm kann dies ebenfalls. Benötigt wird ein GPX-Log, also eine XML-Datei in der die GPS-Positionen mit einem Zeit-Stempel versehen aufgelistet sind. Alternativ können Bilder auch mit einer Geo-Koordinate über eine Karte versehen werden.
Quelle für das GPX-Log
GPS-Logs können von unterschiedlichsten Geräten aufgenommen werden: es benötigt nur einen GPS-Empfänger, einen Akku und einen Speicher – sowie die Möglichkeit, auf diese aufgezeichneten Daten zugreifen zu können.
Mögliche Quellen für das GPX-Log:
- GPS-Tracker (z.B. für Wanderer oder auch zur Tierortung mit integriertem Sender)
- GPS-Tracking-Apps (für Smartphones) z.B. der Standort-Verlauf von Google
- GPS-Logs aus dem Schiffsmanagementsystem (über NMEA-0183 oder NMEA-2000)
Format des GPX-Logs
Der GPX-Standard wurde von TopoGrafix entwickelt. Es ist ein XML-Standard, offen und lizenzfrei und seit mehr als 20 Jahren praktisch unverändert und stabil. Ideal für eine langfristige Speicherung von Informationen. Obwohl es als Austausch-Format definiert wurde ist es auch als Archivierungsformat sehr gut geeignet.
Für jeden Datenpunkt <trkpt> sind die Angaben von Länge (longitude lon) und Breite (latitude lat)im WGS-84 Format erforderlich. Die Zuordnung erfolgt über die Zeit, die im <time> Tag angegeben ist. Dabei ist die Zeitzonen-Verschiebung zu berücksichtigen. Im Beispiel unten ist ein Punkt aus dem NMEA-2000-Protokoll der SolarWave dargestellt. <name> wird nicht verwendet. Die Zeit ist in <time> als UTC-Zeit angegeben (zu erkennen an dem letzten Z vor dem abschließenden </time>-Tag.
<?xml version="1.0" encoding="UTF-8"?>
<gpx xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
version="1.1"
creator="Voyage Recorder Converter - www.yachtd.com"
xmlns="http://www.topografix.com/GPX/1/1"
xsi:schemaLocation="http://www.topografix.com/GPX/1/1/gpx.xsd">
<metadata>
<time>2018-07-18T15:33:28.656Z</time>
</metadata>
<trk>
<name>My Vessel Track</name>
<trkseg>
<trkpt lat="39.446296300" lon="20.007298800">
<name>2018-07-18 18:34:00.073</name>
<time>2018-07-18T15:34:00.073Z</time>
</trkpt>
</trkseg>
</trk>
</gpx>
Zuordnen der GPX-Logs zu den Bildern
Die wesentliche Voraussetzung für eine automatische und fehlerfreie, nachträgliche Zuordnung der GPS-Koordinaten aus GPX-Logs zu den Bildern ist die Qualität der Daten:
- Aufnahmezeit der Bilder
- Genauigkeit der GPS-Positionen im Log
- Ausreichende zeitliche Auflösung des GPX-Logs
- Korrekte Zuordnung der GPX-Logs zur Kamera
Aufnahmezeit der Bilder
Alle Bilder sollten entweder mit UTC oder mit der Schiffszeit aufgenommen werden. Auf keinen Fall sollte versucht werden, Bilder die mit verschiedenen Zeitzonen aufgenommen wurden, mit einem GPX-Log zu verarbeiten.
Genauigkeit der GPS-Positionen im Log
In GPX-Logs können deutliche Ausreißer auftreten: diese können durchaus mehrere hundert Meter, teilweise sogar tausende von Kilometern betragen, Das GPS-System ist im Normalbetrieb nicht darauf ausgelegt, dass jede Positionsbestimmung immer perfekt ist: Ziel ist, dass mehr als 95% der Bestimmungen genauer als 15m sind. Zusätzlich können Störungen auftreten: Störungen des Gesamtsystems oder – viel häufiger! – Störungen des eigenen Empfangssystems. Dabei kann schon die Abdeckung durch überhängende Bäume (auf einem Fluss) den Empfang so stark verschlechtern, dass die GPS-Positionen verfälscht werden oder entfallen.
Schiffsmanagement-Systeme korrigieren diese Ausreißer automatisch, so dass die Qualität der Schiffs-Logs weit überdurchschnittlich gut ist.
Ausreichende zeitliche Auflösung des GPX-Logs
Je nach Geschwindigkeit des Beobachters sind verschiedene zeitliche Auflösungen sinnvoll. Bei uns liegen die Geschwindigkeiten im Bereich 1-10 km/h, d.h. die Größenordnung ist ~ 1 m/s. Bei einer Log-Auflösung von 1 min erreichen wir eine Positionsgenauigkeit, die besser als 100 m ist. Das ist für unsere Zwecke vollkommen ausreichend. Bei besonders schutzwürdigen Lebewesen, die standort-gebunden leben, wird die Auflösung bei der Erfassung als Beobachtung zusätzlich künstlich noch verschlechtert, damit der Schutz der Lebewesen gewährleistet ist.
Korrekte Zuordnung der GPX-Logs zur Kamera
Letztlich darf natürlich nicht vergessen werden, dass der GPS-Empfänger zur Zeit der Aufnahme sehr dicht bei der Kamera sein muss. Es wäre nicht hilfreich, das GPX-Log der SolarWave, die am Ankerplatz liegt, zu verwenden, um die Bilder einer Expedition mit dem Kajak oder dem Beiboot nachträglich mit Geo-Koordinaten zu versehen…